- 您现在的位置:买卖IC网 > Sheet目录478 > MMA8452QR1 (Freescale Semiconductor)IC ACCELER 2G/4G/8G 3AXIS 16QFN
�� �
�
�ZYXOW� is� set� whenever� a� new� acceleration� data� is� produced� before� completing� the� retrieval� of� the� previous� set.� This� event�
�occurs� when� the� content� of� at� least� one� acceleration� data� register� (i.e.,� OUT_X,� OUT_Y,� OUT_Z)� has� been� overwritten.� ZYXOW�
�is� cleared� when� the� high-bytes� of� the� acceleration� data� (OUT_X_MSB,� OUT_Y_MSB,� OUT_Z_MSB)� of� all� the� active� channels� are�
�read.�
�ZOW� is� set� whenever� a� new� acceleration� sample� related� to� the� Z-axis� is� generated� before� the� retrieval� of� the� previous� sample.�
�When� this� occurs� the� previous� sample� is� overwritten.� ZOW� is� cleared� anytime� OUT_Z_MSB� register� is� read.�
�YOW� is� set� whenever� a� new� acceleration� sample� related� to� the� Y-axis� is� generated� before� the� retrieval� of� the� previous� sample.�
�When� this� occurs� the� previous� sample� is� overwritten.� YOW� is� cleared� anytime� OUT_Y_MSB� register� is� read.�
�XOW� is� set� whenever� a� new� acceleration� sample� related� to� the� X-axis� is� generated� before� the� retrieval� of� the� previous� sample.�
�When� this� occurs� the� previous� sample� is� overwritten.� XOW� is� cleared� anytime� OUT_X_MSB� register� is� read.�
�ZYXDR� signals� that� a� new� sample� for� any� of� the� enabled� channels� is� available.� ZYXDR� is� cleared� when� the� high-bytes� of� the�
�acceleration� data� (OUT_X_MSB,� OUT_Y_MSB,� OUT_Z_MSB)� of� all� the� enabled� channels� are� read.�
�ZDR� is� set� whenever� a� new� acceleration� sample� related� to� the� Z-axis� is� generated.� ZDR� is� cleared� anytime� OUT_Z_MSB� register�
�is� read.�
�YDR� is� set� whenever� a� new� acceleration� sample� related� to� the� Y-axis� is� generated.� YDR� is� cleared� anytime� OUT_Y_MSB� register�
�is� read.�
�XDR� is� set� whenever� a� new� acceleration� sample� related� to� the� X-axis� is� generated.� XDR� is� cleared� anytime� OUT_X_MSB� register�
�is� read.�
�Data� Registers:� 0x01:� OUT_X_MSB,� 0x02:� OUT_X_LSB,� 0x03:� OUT_Y_MSB,� 0x04:� OUT_Y_LSB,� 0x05:� OUT_Z_MSB,�
�0x06:� OUT_Z_LSB�
�These� registers� contain� the� X-axis,� Y-axis,� and� Z-axis� 12-bit� output� sample� data� expressed� as� 2's� complement� numbers.� The�
�sample� data� output� registers� store� the� current� sample� data.�
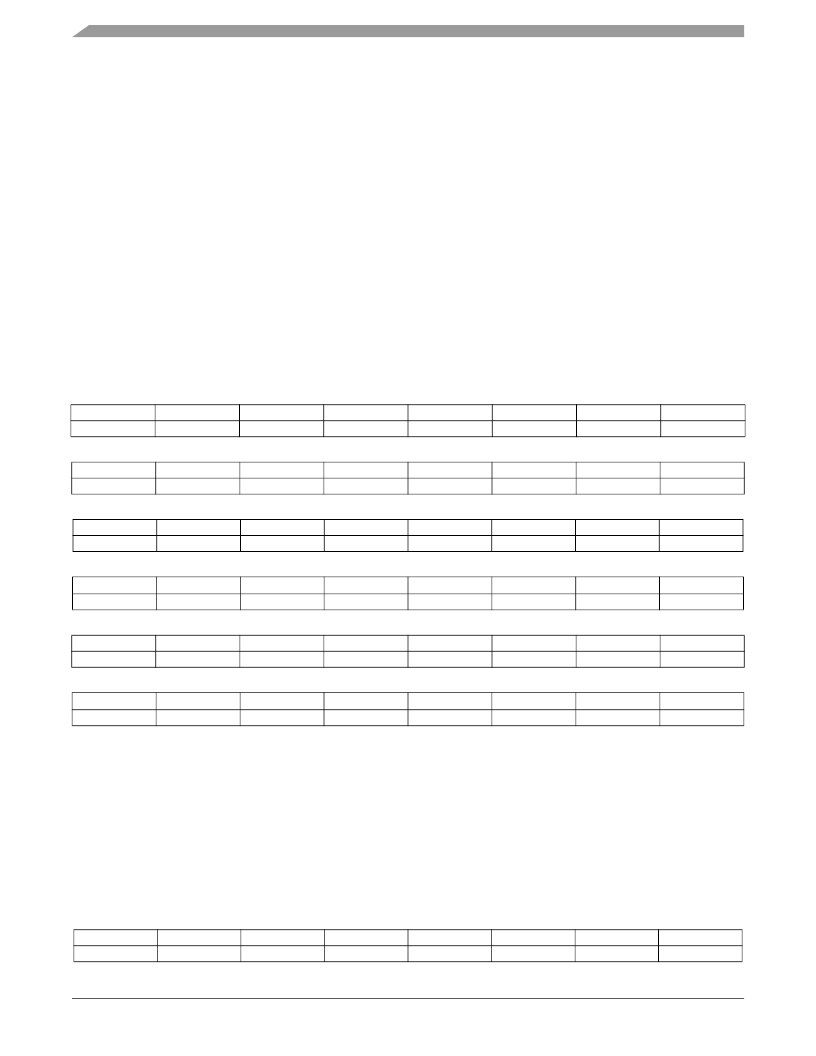
�0x01:� OUT_X_MSB:� X_MSB� Register� (Read� Only)�
�Bit� 7�
�XD11�
�Bit� 6�
�XD10�
�Bit� 5�
�XD9�
�Bit� 4�
�XD8�
�Bit� 3�
�XD7�
�Bit� 2�
�XD6�
�Bit� 1�
�XD5�
�Bit� 0�
�XD4�
�0x02:� OUT_X_LSB:� X_LSB� Register� (Read� Only)�
�Bit� 7�
�XD3�
�Bit� 6�
�XD2�
�Bit� 5�
�XD1�
�Bit� 4�
�XD0�
�Bit� 3�
�0�
�Bit� 2�
�0�
�Bit� 1�
�0�
�Bit� 0�
�0�
�0x03:� OUT_Y_MSB:� Y_MSB� Register� (Read� Only)�
�Bit� 7�
�YD11�
�Bit� 6�
�YD10�
�Bit� 5�
�YD9�
�Bit� 4�
�YD8�
�Bit� 3�
�YD7�
�Bit� 2�
�YD6�
�Bit� 1�
�YD5�
�Bit� 0�
�YD4�
�0x04:� OUT_Y_LSB:� Y_LSB� Register� (Read� Only)�
�Bit� 7�
�YD3�
�Bit� 6�
�YD2�
�Bit� 5�
�XD1�
�Bit� 4�
�XD0�
�Bit� 3�
�0�
�Bit� 2�
�0�
�Bit� 1�
�0�
�Bit� 0�
�0�
�0x05:� OUT_Z_MSB:� Z_MSB� Register� (Read� Only)�
�Bit� 7�
�ZD11�
�Bit� 6�
�ZD10�
�Bit� 5�
�ZD9�
�Bit� 4�
�ZD8�
�Bit� 3�
�ZD7�
�Bit� 2�
�ZD6�
�Bit� 1�
�ZD5�
�Bit� 0�
�ZD4�
�0x06:� OUT_Z_LSB:� Z_LSB� Register� (Read� Only)�
�Bit� 7�
�ZD3�
�Bit� 6�
�ZD2�
�Bit� 5�
�ZD1�
�Bit� 4�
�ZD0�
�Bit� 3�
�0�
�Bit� 2�
�0�
�Bit� 1�
�0�
�Bit� 0�
�0�
�OUT_X_MSB,� OUT_X_LSB,� OUT_Y_MSB,� OUT_Y_LSB,� OUT_Z_MSB,� and� OUT_Z_LSB� are� stored� in� the� auto-�
�incrementing� address� range� of� 0x01� to� 0x06� to� reduce� reading� the� status� followed� by� 12-bit� axis� data� to� 7� bytes.� If� the� F_READ�
�bit� is� set� (0x2A� bit� 1),� auto-increment� will� skip� over� LSB� registers.� This� will� shorten� the� data� acquisition� from�
�7� bytes� to� 4� bytes.� The� LSB� registers� can� only� be� read� immediately� following� the� read� access� of� the� corresponding� MSB� register.�
�A� random� read� access� to� the� LSB� registers� is� not� possible.� Reading� the� MSB� register� and� then� the� LSB� register� in� sequence�
�ensures� that� both� bytes� (LSB� and� MSB)� belong� to� the� same� data� sample,� even� if� a� new� data� sample� arrives� between� reading� the�
�MSB� and� the� LSB� byte.�
�0x0B:� SYSMOD� System� Mode� Register�
�The� system� mode� register� indicates� the� current� device� operating� mode.� Applications� using� the� Auto-SLEEP/WAKE� mechanism�
�should� use� this� register� to� synchronize� the� application� with� the� device� operating� mode� transitions.�
�0x0B:� SYSMOD:� System� Mode� Register� (Read� Only)�
�Bit� 7�
�0�
�Bit� 6�
�0�
�Bit� 5�
�0�
�Bit� 4�
�0�
�Bit� 3�
�0�
�Bit� 2�
�0�
�Bit� 1�
�SYSMOD1�
�Bit� 0�
�SYSMOD0�
�MMA8452Q�
�Sensors�
�20�
�Freescale� Semiconductor,� Inc.�
�发布紧急采购,3分钟左右您将得到回复。
相关PDF资料
MMA8453QR1
IC ACCELER 2G/4G/8G 3AXIS 16QFN
MMBF0201NLT1
MOSFET N-CH 20V 300MA SOT-23
MMBF170-7
MOSFET N-CH 60V 500MA SOT23-3
MMBF170LT1
MOSFET N-CH 60V 500MA SOT-23
MMBF170
MOSFET N-CH 60V 500MA SOT-23
MMBF2201NT1
MOSFET N-CH 20V 300MA SOT-323
MMBF2202PT1
MOSFET P-CH 20V 300MA SOT-323
MMDF1N05ER2G
MOSFET N-CHAN DUAL 2A 50V 8SOIC
相关代理商/技术参数
MMA8452QT
功能描述:加速计 - 板上安装 LOW G 3-AXIS 12BT EX VLT
RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA8453Q
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Xtrinsic MMA8453Q 3-Axis, 10-bit/8-bit Digital Accelerometer
MMA8453QR1
功能描述:加速计 - 板上安装 LOW G 3-AXIS DGTL ACCEL
RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA8453QT
功能描述:加速计 - 板上安装 LOW G 3-AXIS DGTL ACCEL
RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA8491Q
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Xtrinsic MMA8491Q 3-Axis Multifunction Digital Accelerometer
MMA8491QR1
功能描述:加速计 - 板上安装 3-Axis Low Voltage Discrete Tilt Sensor
RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA8491QT
功能描述:加速计 - 板上安装 3-Axis Low Voltage Discrete Tilt Sensor
RoHS:否 制造商:Murata 传感轴:Double 加速:12 g 灵敏度: 封装 / 箱体: 输出类型:Analog 数字输出 - 位数:11 bit 电源电压-最大:5.25 V 电源电压-最小:4.75 V 电源电流:4 mA 最大工作温度:+ 125 C 最小工作温度:- 40 C
MMA8652FC
制造商:FREESCALE 制造商全称:Freescale Semiconductor, Inc 功能描述:Xtrinsic MMA8652FC 3-Axis, 12-bit Digital Accelerometer